Au lycée, j’ai opté pour un baccalauréat en filière scientifique avec option sciences de l’ingénieur. Cette formation prenait la place de la SVT dans le cursus et la remplaçait par divers cours de sciences orientées sur l’informatique, l’électronique et la mécanique des matériaux. J’ai donc pu y suivre des cours sur les bases de l’électronique (porte logique, logique combinatoire, convertisseur…), sur l’informatique avec de la programmation grafcet et C/C++ ainsi que des cours de mécanique où l’on a appris à utiliser l’outil de CAO SolidWorks.
Pour rendre compte du travail réalisé en S.I nous avons eu deux TPE, l’un en première et l’autre en terminale. Pour ces TPE, nous devions imaginer un projet mêlant informatique, électronique et mécanique.
Pour le TPE de première, avec deux autres étudiants, nous avons imaginé un robot capable de se déplacer dans les parcelles agricoles pour récupérer des informations relatives à l’humidité et au PH du sol (entre autres). L’idée était de permettre à l’agriculteur de mieux connaître les besoins en eau et engrais de son domaine agricole. Et cela, avec la plus grande précision géographique possible.
La problématique
L’idée de ce projet est venue de mon expérience personnelle et de celle d’un autre membre du groupe vécue aux Etats-Unis. J’ai eu la chance de participer à un programme d’échange linguistique aux États-Unis. Etant à Boston et lui dans une petite ville du Kansas, nous avons pu mesurer l’échelle colossale à laquelle toutes les infrastructures y sont développées. L’Etat du Kansas est surnommé la réserve à grain de l’Amérique. On y trouve une concentration de domaines céréaliers très importante. Il est nécessaire de prendre en compte l’échelle incroyable à laquelle est pratiquée l’agriculture. Elle n’est pas comparable à celle pratiquée en Europe. Or, en même temps, cette région a de graves problèmes de sécheresse. En effet, le lac alimentant la région est surexploité par les agriculteurs locaux.
On peut y voir à longueur de journée les énormes jets arrosant les champs sans vraiment chercher à savoir si, telle ou telle parcelle a vraiment besoin d’eau. En effet, la topologie d’un champ impacte fortement la capacité du sol à garder son eau. Par exemple, un champ en cuvette sera plus sec sur les pentes qu’au fond de la cuvette, à l’inverse le sommet d’une colline sera plus sec que le bas de la colline etc.
Il nous a donc fallu imaginer un robot capable :
- de se déplacer dans un champ avec toutes les difficultés que cela comporte (présence de boue, pierres, plantes…)
- d’utiliser un instrument de mesure (dans notre cas une sonde à humidité)
- de fonctionner le plus longtemps possible
- et cela, avec un système de guidage permettant au robot de se déplacer et de cartographier l’humidité du terrain sans opérateur.
Nous avons trouvé diverses solutions à ces problèmes après avoir étudié chaque cas et pesé le pour et le contre de chaque solution. (si vous souhaitez plus d’informations sur les solutions techniques retenues pour la conception du robot, un dossier est disponible en bas de page).
Mon apport au projet et sa conception technique

Mon travail dans ce projet était de créer l’algorithme principal du robot, son système de déplacement ainsi que la conception et l’élaboration de diverses parties électroniques. En effet, nous avons utilisé un Raspberry pi comme unité centrale et un Arduino méga, pour contrôler les divers éléments constituant le robot (hors système de guidage) tels que : le GPS, la sonde, le pilotage des moteurs ou le module GSM (communiquant les résultats obtenus).
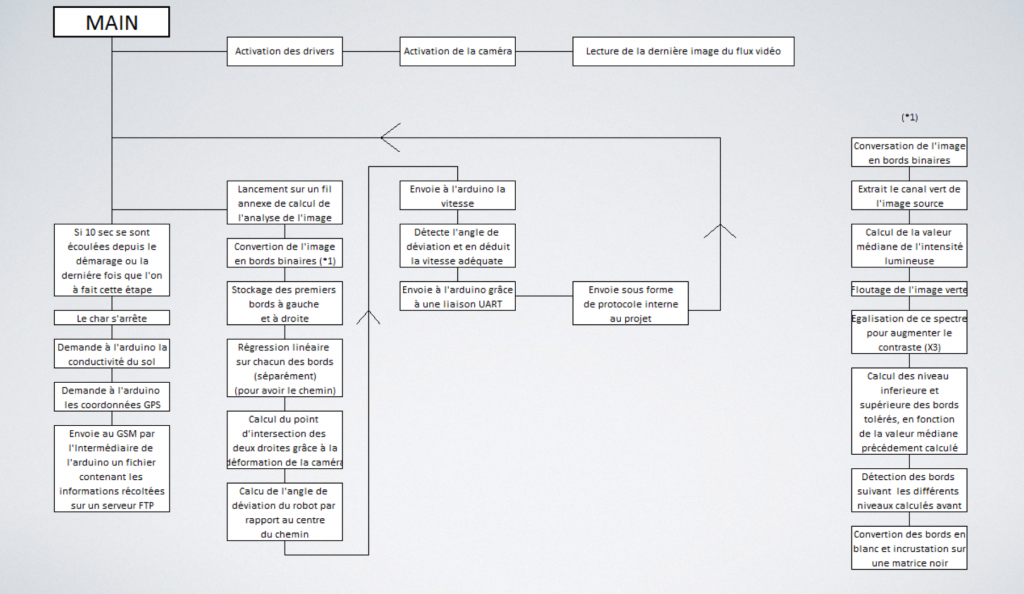
J’ai écrit le programme principal coordonnant les modules pilotés par l’Arduino depuis le raspberry pi. J’ai également élaboré la partie responsable de son déplacement. J’ai pour cela mis au point un algorithme de reconnaissance des plantes (simulé par des ballons) avec l’aide de la librairie OPENCV. Une attention toute particulière à des problématiques telles que la gestion de tâches parallèles, la reconnaissance d’objets ou bien l’obtimisation des algorithmes compte tenu de la puissance de calcul limitées, a été au cœur de très nombreuses heures de programmation.
Ce projet m’a occupé la majeure partie de l’année scolaire. Me passionnant plus que de raison. J’y ai appris nombre des compétences qui me sont aujourd’hui utiles. A l’inverse des TP réalisés en classe, le développement de ce projet s’est fait sans “guide“. Avant ce TPE, je maitrisais déjà correctement le language C++ et divers frameworks clés. Mais, le fait d’avoir un projet où tout était à penser de A à Z d’un point de vue de l’architecture principal, m’a énormément apportée dans ma manière de penser un algorithme et un programme informatique. J’ai également considérablement amélioré ma compréhension et ma maitrise de Linux lors de ce TP.
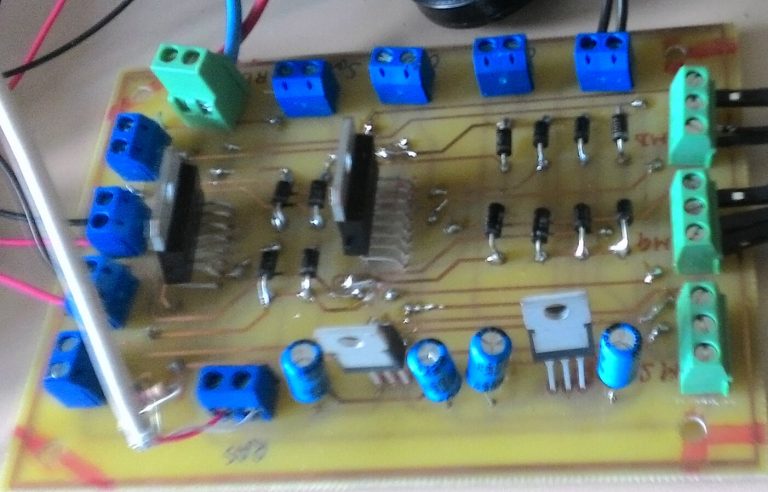
J’ai aussi conçu le circuit imprimé pilotant les moteurs et la partie puissance du robot en collaboration avec mes camarades. Il a fallu pour cela choisir les composants ainsi que les dimensionner pour répondre au cahier des charges. Ce fut ma première véritable conception de carte électronique complète. La partie électronique de ce TPE m’a fait réellement aimer cette discipline.
Le robot jardinier ou “The Gardener“ nous a permis de participer au concours des sciences de l’ingénieur 2017 où l’on a obtenu le prix des collégiens.
Pour plus d’informations sur ce projet vous pouvez télécharger le document qui a été remis au jury, parcourir les quelques documents suivants ou bien me contacter.